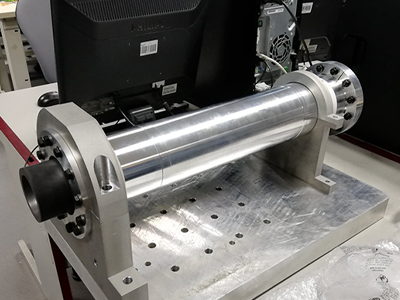
During their free time at ISAE-Supaero, Eric and Emilien worked on a suborbital rocket hybrid engine. The Griffon engine is capable of lifting 20 [kg] of payload up to 3000 [m]. Griffon engine uses 3D printed ABS as fuel and hydrogen peroxide as oxidizer. A third element, considered as an inert gas, is used to...